The style of this blog is pretty Cartan-ian
Recently, I’m interested in a series paper of Антон Юрьевич Алексеев, they were about the 
Now, let 






- The left action:
,
, the fundamental vector field of this action is denoted by
. The tangent map
of
at
determines a linear map
(it is a
valued 1-form), it is called the left Cartan-Maurer form on
.
- The Right action:
,
, the fundamental vector field associate to this cation is denoted by
. The tangent map
of
at
, it is called right Maurer-Cartan form, denoted by
.
- The Adjoint action:
,
, the fundamental vector field associate to this action is denoted by
. Its differential at
.
If we choose an adjoint invariant inner product on 
![\begin{aligned}\chi:=\frac{1}{4}\langle \theta,[\theta,\theta]\rangle=\frac{1}{4}\left\langle\bar{\theta}, \left[\bar{\theta},\bar{\theta}\right]\right\rangle\end{aligned}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Baligned%7D%5Cchi%3A%3D%5Cfrac%7B1%7D%7B4%7D%5Clangle+%5Ctheta%2C%5B%5Ctheta%2C%5Ctheta%5D%5Crangle%3D%5Cfrac%7B1%7D%7B4%7D%5Cleft%5Clangle%5Cbar%7B%5Ctheta%7D%2C+%5Cleft%5B%5Cbar%7B%5Ctheta%7D%2C%5Cbar%7B%5Ctheta%7D%5Cright%5D%5Cright%5Crangle%5Cend%7Baligned%7D&bg=ffffff&fg=444444&s=0&c=20201002)
where ![[\theta,\theta]=2\theta\wedge\theta](https://s0.wp.com/latex.php?latex=%5B%5Ctheta%2C%5Ctheta%5D%3D2%5Ctheta%5Cwedge%5Ctheta&bg=ffffff&fg=444444&s=0&c=20201002)


The Maurer Cartan forms will satisfy the Maurer-Cartan equation:
Theorem 1 (Maurer-Cartan Equation): We have the following equations:

The proof can be found in many (or only a few) differential geometry textbooks (not textbooks of Lie theory), such as Spivak’s Differential Geometry and Koboyashi’s.
Theorem 2: We have the following relations:

proof. We have following commutative diagram:
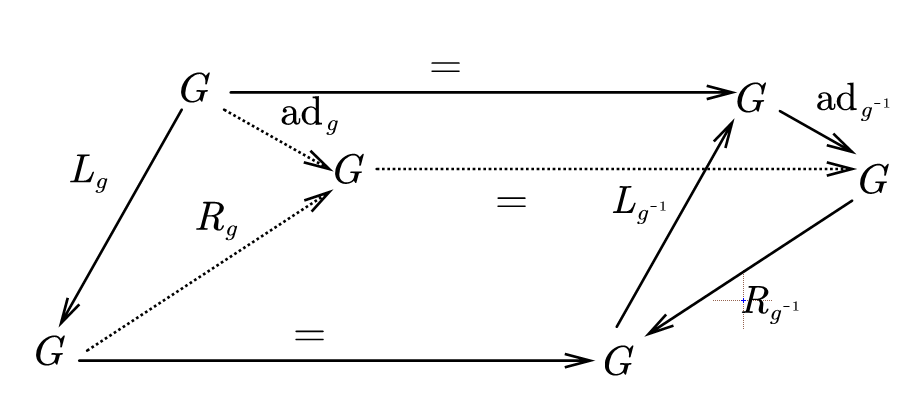
by differentiating this diagram, we have:
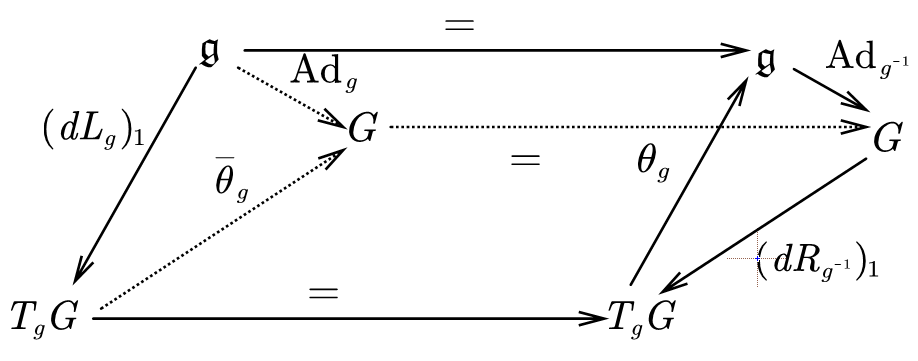
Hence the relations are illustrated in this commutative diagram.

Next, we shall investigate the fundamental vector fields of those three canonical actions:
Theorem 3: We have

and for adjoint action, we have

hence consequently, by Theorem 2, we have

proof. By definition, we have

Similarly, for right action we have:

Now , for adjoint action, we have

hence

As was to be shown.
Remark: In some contents, the fundamental vector field is defined by taking 

Theorem 4: Define the multiplication map 


here 

proof. For any 

Notice that, the curve

satisfies the initial condition 


hence the same thing holds for 

hence 
Corollary 4-1: If we define 


Theorem 5: Let 


proof. For 





By definition, we can compute by Leibniz rule:
![\begin{aligned}(\mu_1\cdot\mu_2)^*\theta (V)&=\left.\frac{d}{dt}\right|_{t=0}\mu_2^{-1}(x)\mu^{-1}_1(x)\mu_1(\gamma_V(t))\mu_2(\gamma_V(t))\\&=\left.\frac{d}{dt}\right|_{t=0}\left[\mu_2^{-1}(x)\mu^{-1}_1(x)\mu_1(\gamma_V(t))\mu_2(x)\right]\cdot\left[\mu_2^{-1}(x)\mu_2(\gamma_V(t))\right]\\&=\mathrm{Ad}_{\mu_2^{-1}}\theta_{\mu_1}(d\mu_1)_xV+\theta_{\mu_2}(d\mu_2)_xV\end{aligned}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Baligned%7D%28%5Cmu_1%5Ccdot%5Cmu_2%29%5E%2A%5Ctheta+%28V%29%26%3D%5Cleft.%5Cfrac%7Bd%7D%7Bdt%7D%5Cright%7C_%7Bt%3D0%7D%5Cmu_2%5E%7B-1%7D%28x%29%5Cmu%5E%7B-1%7D_1%28x%29%5Cmu_1%28%5Cgamma_V%28t%29%29%5Cmu_2%28%5Cgamma_V%28t%29%29%5C%5C%26%3D%5Cleft.%5Cfrac%7Bd%7D%7Bdt%7D%5Cright%7C_%7Bt%3D0%7D%5Cleft%5B%5Cmu_2%5E%7B-1%7D%28x%29%5Cmu%5E%7B-1%7D_1%28x%29%5Cmu_1%28%5Cgamma_V%28t%29%29%5Cmu_2%28x%29%5Cright%5D%5Ccdot%5Cleft%5B%5Cmu_2%5E%7B-1%7D%28x%29%5Cmu_2%28%5Cgamma_V%28t%29%29%5Cright%5D%5C%5C%26%3D%5Cmathrm%7BAd%7D_%7B%5Cmu_2%5E%7B-1%7D%7D%5Ctheta_%7B%5Cmu_1%7D%28d%5Cmu_1%29_xV%2B%5Ctheta_%7B%5Cmu_2%7D%28d%5Cmu_2%29_xV%5Cend%7Baligned%7D&bg=ffffff&fg=444444&s=0&c=20201002)
this implies the result.
In Anton’s paper, he defined the quasi-Hamiltonian space 
- A smooth manifold
;
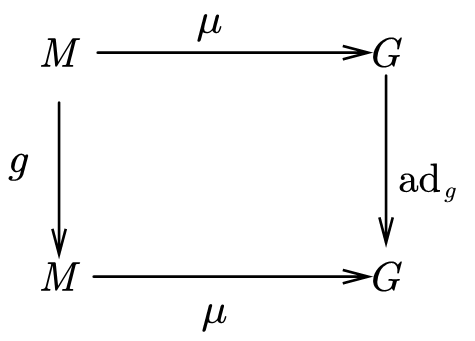
- A
, which is equivariant, where
The moment map, and the 2-form
, for all
, for all

I will explain why we request these 3 properties. The 1st equation is a natural replacement (I did not see why it is natural) of the usual moment map condition: 



The 2nd equation, is requesting 

In order to compute the 1st assertion, we need the following fact:
Theorem 6: For equivariant 

proof. Notice that the curve 



as was to be shown.
Next, we shall find what is 
![\begin{aligned}\frac{1}{2}d\mu^*\langle\theta+\bar{\theta},X\rangle&=\frac{1}{2}\mu^*\langle d\theta+d\bar{\theta}, X\rangle\\&=-\frac{1}{4}\mu^*\langle[\theta,\theta],X\rangle+\frac{1}{4}\mu^*\left\langle\left[\bar{\theta},\bar{\theta}\right],X\right\rangle\\&=\frac{1}{4}\mu^*\langle[\theta,\theta], \theta \underline{X}_R\rangle+\frac{1}{4}\mu^*\left\langle\left[\bar{\theta},\bar{\theta}\right],\bar{\theta}\underline{X}_L\right\rangle\\&=\mu^*\iota_{\underline{X}_L}\chi+\mu^*\iota_{\underline{X}_R}\chi=\mu^*\iota_{\underline{X}_A}\chi\\&=\iota_{\underline{X}}\mu^*\chi\end{aligned}](https://s0.wp.com/latex.php?latex=%5Cbegin%7Baligned%7D%5Cfrac%7B1%7D%7B2%7Dd%5Cmu%5E%2A%5Clangle%5Ctheta%2B%5Cbar%7B%5Ctheta%7D%2CX%5Crangle%26%3D%5Cfrac%7B1%7D%7B2%7D%5Cmu%5E%2A%5Clangle+d%5Ctheta%2Bd%5Cbar%7B%5Ctheta%7D%2C+X%5Crangle%5C%5C%26%3D-%5Cfrac%7B1%7D%7B4%7D%5Cmu%5E%2A%5Clangle%5B%5Ctheta%2C%5Ctheta%5D%2CX%5Crangle%2B%5Cfrac%7B1%7D%7B4%7D%5Cmu%5E%2A%5Cleft%5Clangle%5Cleft%5B%5Cbar%7B%5Ctheta%7D%2C%5Cbar%7B%5Ctheta%7D%5Cright%5D%2CX%5Cright%5Crangle%5C%5C%26%3D%5Cfrac%7B1%7D%7B4%7D%5Cmu%5E%2A%5Clangle%5B%5Ctheta%2C%5Ctheta%5D%2C+%5Ctheta+%5Cunderline%7BX%7D_R%5Crangle%2B%5Cfrac%7B1%7D%7B4%7D%5Cmu%5E%2A%5Cleft%5Clangle%5Cleft%5B%5Cbar%7B%5Ctheta%7D%2C%5Cbar%7B%5Ctheta%7D%5Cright%5D%2C%5Cbar%7B%5Ctheta%7D%5Cunderline%7BX%7D_L%5Cright%5Crangle%5C%5C%26%3D%5Cmu%5E%2A%5Ciota_%7B%5Cunderline%7BX%7D_L%7D%5Cchi%2B%5Cmu%5E%2A%5Ciota_%7B%5Cunderline%7BX%7D_R%7D%5Cchi%3D%5Cmu%5E%2A%5Ciota_%7B%5Cunderline%7BX%7D_A%7D%5Cchi%5C%5C%26%3D%5Ciota_%7B%5Cunderline%7BX%7D%7D%5Cmu%5E%2A%5Cchi%5Cend%7Baligned%7D&bg=ffffff&fg=444444&s=0&c=20201002)
So, we can see that the 

The 3rd condition is requesting that 

Theorem 4 and Theorem 5 are saying that the double

is a quasi-Hamiltonian space with the commutator as the moment map
![\mu=\mu_1\cdot\mu_2:G\times G\longrightarrow G, \,\, (a,b)\mapsto [a,b]=aba^{-1}b^{-1}](https://s0.wp.com/latex.php?latex=%5Cmu%3D%5Cmu_1%5Ccdot%5Cmu_2%3AG%5Ctimes+G%5Clongrightarrow+G%2C+%5C%2C%5C%2C+%28a%2Cb%29%5Cmapsto+%5Ba%2Cb%5D%3Daba%5E%7B-1%7Db%5E%7B-1%7D&bg=ffffff&fg=444444&s=0&c=20201002)
